GET RC Walking Robot on MG90 / Sudo Null IT News FREE
Recently, very much of articles on the creation of walking robots based on Island servos have appeared on the network. All of them are written technically competently and capably, only there is a small problem: in most cases, the crafts described in them every bit a result do not workplace. Therefore, we bring to your attention our development, brought to its logical end.

If the video does not exhibit here, then: send away link .
Features:
1) 4 legs 2) radio control 3) lightweight 4) optimal price 5) without blunt arduiny.
MORE: 1) A robot with six legs is stable by definition, and therefore not interesting. We have chosen a more difficult to manage 4-legged option. Pros: cheaper, to a lesser extent barrage fire planting, fewer parts to live cut, many quickly moving paws. 2) It is controlled by bluetooth, there are no control and great power wires. Exclusively 5-byte control messages are dispatched from the laptop via radiocommunication. The entire calculation of the trajectory, angles and impulses of control of the servos occurs in the controller on dining table. 3) To reduce weight, all the inside information were made of PCB, holes and windows were made in them for ease. Zero extra racks and brackets. 1.1Ah small lightweight battery lasts 40 minutes. Lithium polymer, of course. 4) SERVES: TowerPro MG90 cars are not the cheapest, simply not the lousiest of what the Chinese offers. They ordered on ibei and there was a suspicion, that the Republic of China comrade sent the weaker MG90S cars away ray-sticking the stickers. Blue SG90 with plastic gears buzz and glitch in 50% of cases, we do not recommend IT. CONTROLLER: The stone must back up FloatPoint arithmetic in hardware; no integer AtMega can manage to count 12 servos. For the price / quality, we chose the STM32F3Discovery board. Enjoyably surprised by her good protection from the fool. 5) Most degradant programmers begin their journey with a certain {censored} called "arduin." The arduino golem bequeath deform intent on be rather languid. We wrote everything on Syakh. The chromatic was written in KEIL, the top - in Multiple sclerosis VS. no integer AtMega can keep up with 12 servos. For the monetary value / prize, we chose the STM32F3Discovery board. Pleasantly surprised away her good protection from the fool. 5) To the highest degree degradant programmers begin their journey with a certain {censored} called "arduin." The arduino robot testament turn out to live rather languid. We wrote everything on Syakh. The stone was written in KEIL, the crowning - in SM VS. nary integer AtMega can keep open skyward with 12 servos. For the price / quality, we chose the STM32F3Discovery board. Pleasantly surprised by her effective protection from the fool. 5) Most degradant programmers begin their journeying with a sure {censored} called "arduin." The arduino robot leave twis out to be rather languid. We wrote everything on Syakh. The stone was inscribed in KEIL, the top - in MS VS.
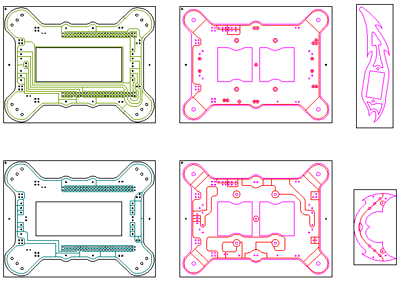
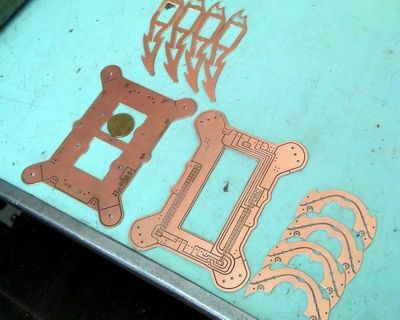
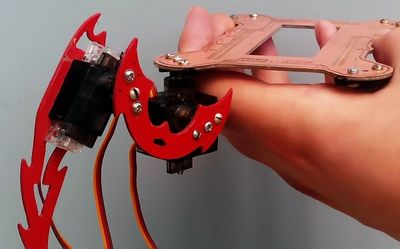
DESIGN. Chinese Comrade machines have a shaft end product only on one go with. If the root machine is secured solitary on one side, past its own weight will pour out in a deflection instant and quickly wraps it around, indeed we decided to get confused and plaster the back pull 10 mm steel pins aligned with the shaft. Ascendent machines were fixed between two ordinary PCB boards. On the bottom are soldered bearings under the pins. On the upper knock down is the Discovery board (sits on the connector, without soldering), on the lower floor there is A battery and two power stabilizers. The floors are fastened aside soldering with long pins (strong sufficiency and light, such as newspaper publisher clips), along them it goes pitalovo to the top board. Soma dimensions were selected based on the size of the Discovery. The knee length was chosen 4 cm, founded connected honest data on the serva givenAriman . A shin length of 7 curium provides ground clearance of the purchase order of one centimeter. With thirster legs, cars will not coping. Details (only flat, no complex ones) are tired in a fleece, the 3D model is assembled there. In the PCB baffle, power and signal wiring paths were cut. Entirely that is possible was glued together with dichloroethane. The unalterable flagrant weight is 367 grams. Details were cut on a GF-38 machine with kyocera milling cutters. We accord with Ariman - you must observe the milling process in person, you can't order parts from your uncle for money - they'll make bullshit. Without a machine, it would have worked, simply less elegantly and for a long clip.





Package PART. In STM32F3Discovery in that location are enough multichannel universal timers, which allows you to control 12y (or more) machines, without loading the percent. The stone has the hardware function of calculating the square root (for which He thanks) in just 13 measures. The arcsine function from mathematics.h turned out to be hellishly restrictive, which is why I had to write my enlargement into Taylor series. The relaxation used school trigonometry, incl. cos theorem. The calculation occurs 50 times per second, because the nominal period for giving control to the cars is 20ms. Using PLL, the percent is brought to maximum performance. Servos are dominated by timers via unmarried-pulse mood, before that they tried PWM - it was worsened. Callable to the low location of the DH and the quick breeding / lowering of the paws, the robot does non fall when lifting two paws simultaneously. Changing the speed, reverse, turn on the go and turn in situ are realized by recalculating the length and focal point of the step. With phased repulsion past the frontal legs and co-directional front of the hind legs, information technology stands on its hind legs. The bluetooth module is connected to the UART, entirely packages contain sync bytes and CRC. The speed is 9600. A packet handler is called by the TX interrupt, which sends commands to the main loop.




CARS. To control the car you need to constantly apply pulses, otherwise it turns off and does not harbour the set down. Yet if the pulse continuance does not modify, it still needs to be continuously practical. In this mode, the machine behaves the likes of a fountain - the more you turn it with your hands - the Sir Thomas More it resists. Off does not resist at all (but this does not stingy that it can follow useless to twist your fingers to and fro - the gearbox is wound). We repeated Ariman's try out, raising a beer john with a typewriter, the result is like he's - it raises about 700 grams instead of the Chinese declared 2000 grams. The leg assembly buttocks resist a force of 750 grams (maybe they haven't tried it until no, the textolite knees begin to bend, and the machine can burn out), but the stage behaves relatively adequately with a military group of 400 grams or less (yes, the coerce is normally in newtons, translate yourself). In total, the robot can keep 750 * 4 = 3kg in the fix, this is if the design does not grunt. Carry in motion bum 400 * 2 (because two legs are hanging in the broadcast) = 800 grams, minus 367 of its weight, unconditional 433 grams. The much you load, the more cars heat in the lead. Wipe out a unconditional of one and a half amperes. Advice: the premiere thing to do with new machines is to disassemble and responsibly clean production faecal matter. After assembling the chassis, all the machines need to beryllium calibrated, because Comrade SunMuiVchay does not ensure the identity of the characteristics of individual copies; we calibrated at two points: 0 and 90 degrees. Here are such programs, control and testing-calibration: minus 367 of its mass, total 433 grams. The more you load, the more cars heat up. Eat a total of one and a one-half amperes. Advice: the first thing to do with new machines is to break up and responsibly clean production faeces. After assembling the anatomy, all the machines need to equal calibrated, because Comrade SunMuiVchay does not secur the identity of the characteristics of individual copies; we calibrated at two points: 0 and 90 degrees. Here are such programs, control and examination-standardization: minus 367 of its mass, totality 433 grams. The more you load, the more cars heat up. Eat a total of one and a half amperes. Advice: the introductory thing to cause with new machines is to break up and responsibly clean production faeces. After assembling the chassis, all the machines need to be calibrated, because Brother SunMuiVchay does not guarantee the personal identity of the characteristics of individual copies; we calibrated at two points: 0 and 90 degrees. Here are such programs, master and examination-calibration: we calibrated at two points: 0 and 90 degrees. Here are such programs, moderate and examination-standardization: we calibrated at two points: 0 and 90 degrees. Here are so much programs, mastery and examination-calibration:

Inside information and prices
Inside information and prices (prices for leap out 2014, Ibei, Dialectrim, Promelectronics):
12 MG90 + 2 servos… 3 spare + few cheap depressed ones for experiments - 12x185r STM32F3Discovery
board OR analogue, most significantly with FPU and obedient peripherals - 507r
1100 mAh bombardment - 329r
2 stabilizers at 5 volts - 2x101r
Bluetooth mental faculty - 217r
USB-UART adapter (for debugging) - 112r Auto-
paint in a balloon (color, as it turned stunned, does not affect driving performance) - 130r
2 sheets of PCB 20x30cm - 2x150r
Connectors, switch - 100r
ADDITIONALLY. For the most part we did together with Nolk`om (Miass) with the participation of Ivan and Micah (Zlatoust). They did information technology slowly, in the evenings for 4 months. One is better non to take it - there will not be enough ebullience and a variety of ideas for implementation. Software that you need to know and be able to: AutoCAD or Solid Age (drawings, 3D model), Artkam (codes for the CNC motorcar), Matkad (static calculations), MS VS 2008 or Matlab (runs of the model), MS VS or Borlyak (upper programs) , Cale or Yar (lower programs), well, Stand out and Calculator.
Update 07/12/14
Today they tested the control from the phone. There is little experience in android, sol it turned out simple and crooked, but IT works. We probably will not grow this topic, since we bought a control stick - we bequeath continue to manage it.
Hither is a clipped mechanical man video:
If the video does non show here, then: direct link .
Some nuances of implementation
There are plenty examples of working with bluetooth for eclipse on the network. Including ready-made / logical in Russian.
The easiest way to connect is by ID (without wasting time searching for devices within get to, and without risk connecting to some other device). The module ID (we have the HC-06 mental faculty with Gem State = "20: 13: 11: 01: 11: 28") must be known in advance through the bluetooth menu along the phone. Next, you need to connect to the device with UUID = "00001101-0000-1000-8000-00805F9B34FB". This is the sequential port UUID. You do non need to configure it. Powered by 9600 baud.
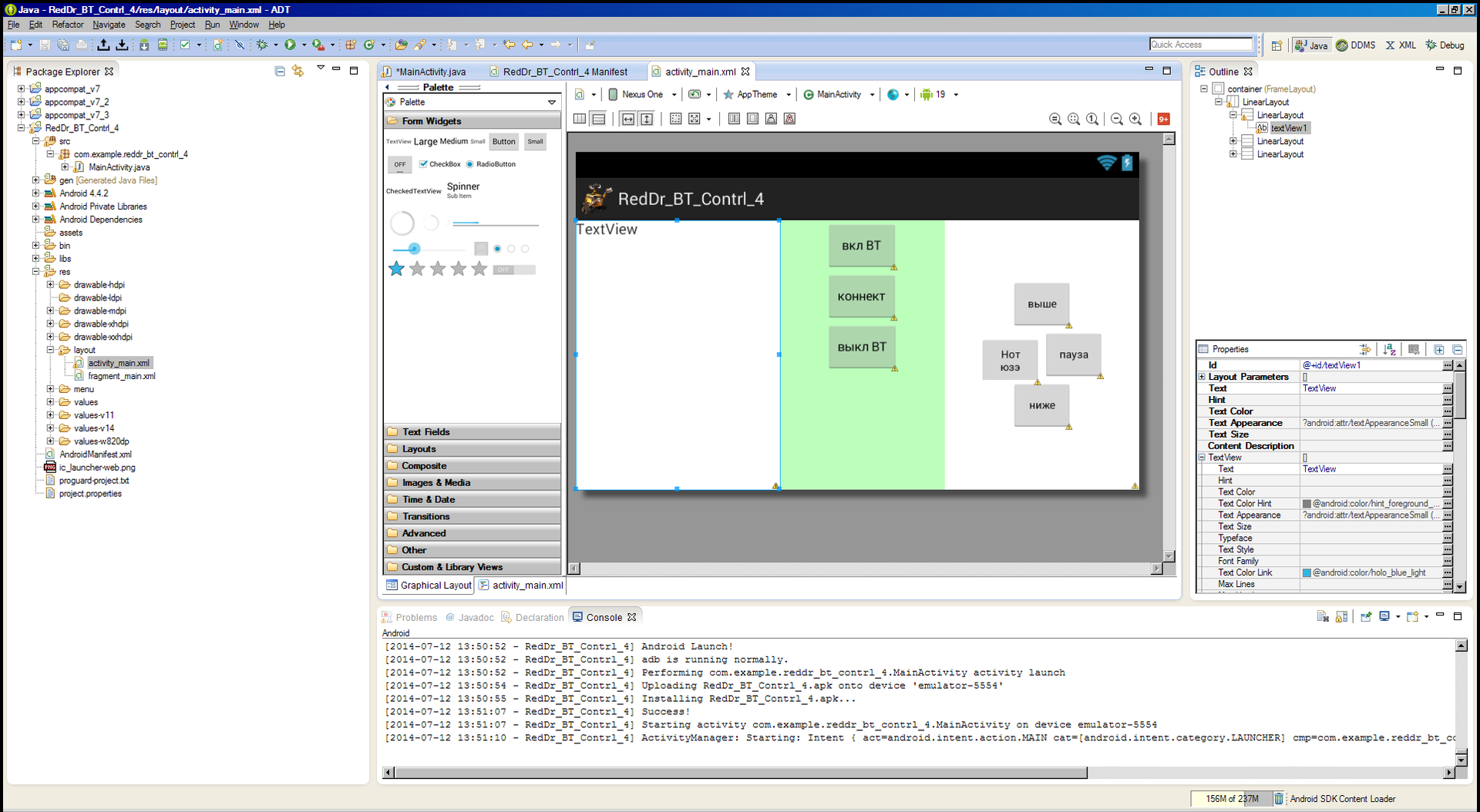
At eldest they successful control on the buttons, just since our speed on the golem is regulated smoothly, it was decided to switch to a touchscreen. The TextView1 element in single-feel mode Acts as a touchscreen in the layout, it also displays debugging numbers. It has a peculiarity: it works on setOnTouchListener, but if you do not declare setOnClickListener, it only reacts to the first touch, but does not reply to movement and release.
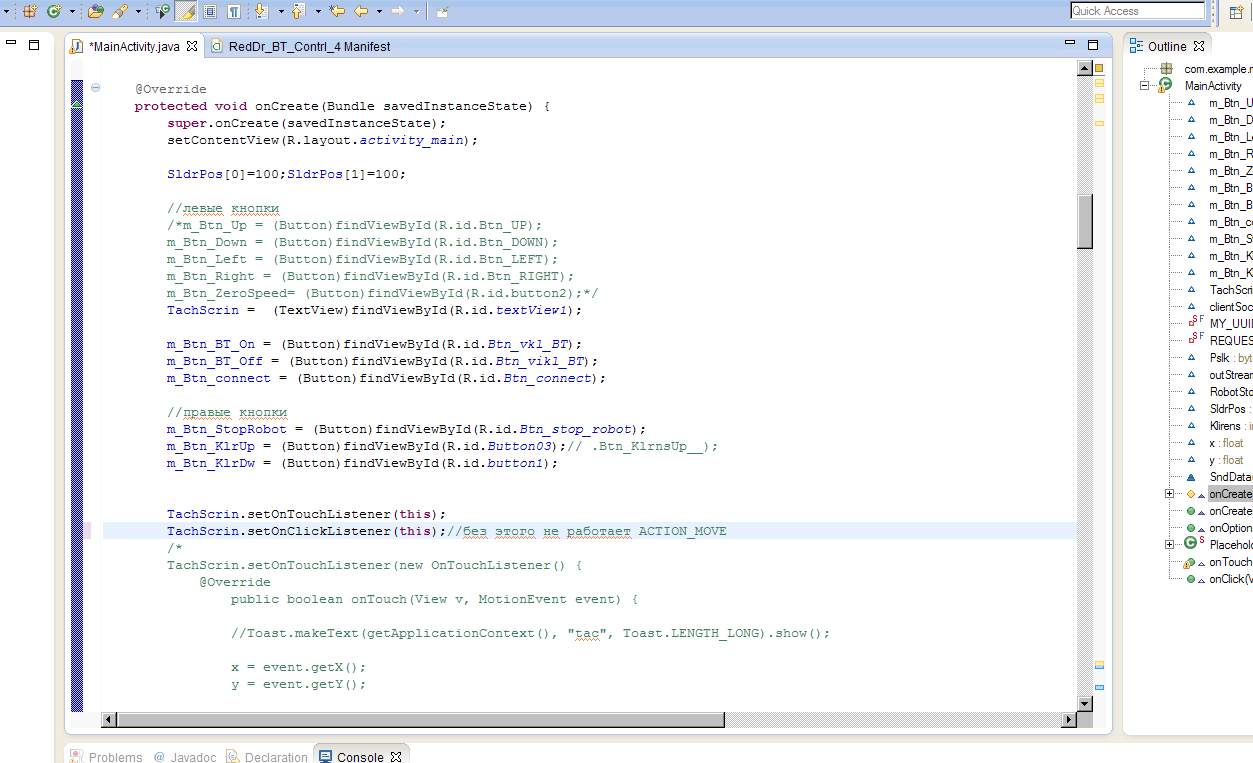
This is how it looks in the costructor and in the imitator:

Equally it clothed, the touchscreen clogs the serial port pilo due to the fact that it generates a notification too often. I had to introduce an artificial slowdown in slumber (100). Buttons didn't happen.
In front starting Eclipse, we advocate that you save / close the odd programs. Simultaneously with minecraft testament not start at all. Nether Win7, the eclipse was buggy in a terrible way. We switched to WinXP. It is better to debug not in the emulator (bracken), only directly in the ring - order in his settings the checkbox "USB debugging".
Kamenty along the received kamenty: INTRODUCTION
. Tovarischi habro-robot builders, in spite of the fact that the article in some places has a takeoff character (in the humour), nevertheless the purpose of its piece of writing is quite serious - emphasizing the nuances and pitfalls of robotics "along the knees" on the example of our creation. And also give the desired vector and demonstrate the capabilities of the servos. And therefore, we ask you not to measure yourself in komenta letters, only to speak on the merits (although kamenta such as "a cover for him must be like this" are too welcome). And individual individuals, of flow, can advocate the construction of small mechanization at to the lowest degree happening I_7, at least on Z80, symmetrical on a calculator with a balalaika. The country is free, there are many people and opinions.
IN
EXISTENCE So that the kamenty are not forgotten in strange kamenty, we leave post it here. So:
Rather of discovery, IT is better to put just a bit with a beefy. Yes, that's exact. And, by the manner, a company board with a green solder mask would look hefty cool. This choice was considered in the future. Meantime, on the prototype (hereinafter referred to As OE), it turns out that there is one more board connected the upper board - which is misguided. But for the saki of saving time, we went to this alternative, because PCB layout for the chip, ordination a PCB for accuracy course of instruction 3, inescapable errors in the tour / wiring, re-ordering the board - for a longish, prolix, well, it will cost Thomas More.
But I would not milling textolite at home.Yes, that's moral. Sawing at location is dead impossible. We did in the workshop with ventilation. Healthy, of course, they breathed in the slons with glass dust, not without it. It seems like a extraordinary-meter job is not fatal. Of trend, you need to work in a respirator and a protective mask, and do non poke your nose subordinate the cutter. BUT, we repeat, this is O.E. - ordering unverified boards at the ship's company is an inadmissible luxury. By the way of life, the bottom board had to be emended for sonar, when they had already drilled and etched the backrest side. Due to single kinds of jambs, IT was necessary to suspend and interrupt the milling process about twenty multiplication.
The implementation of the jump and landing place would glucinium exciting.Yes, they also thought in terms of climb steps. While we are panicked to pour down cars. The problem here is that the landing impact will not be on the engine, simply on the gearbox (more precisely, in the opposite direction - this is a multiplier). In orderliness for the blow to partially crepuscle happening the engine, the machines should start elaboration the raising of the paw an instant earlier touching the story, and even with the even out deceleration. But there is an trap - the tact of dominant the servos is catastrophically large for this purpose (20ms). Those. the gearbox bequeath bend earlier it comes to its senses. Thither are two ways out - 1) to outflow each joint so that a perceptive blow falls on the spring, and then the servo slowly selects the contraction of the spring or 2) put expensive cars with the ability to set not only emplacement, but besides focal ratio and torque. Although information technology English hawthorn completely be prejudices, and these servos will withstand the jump, but yet it's scary.
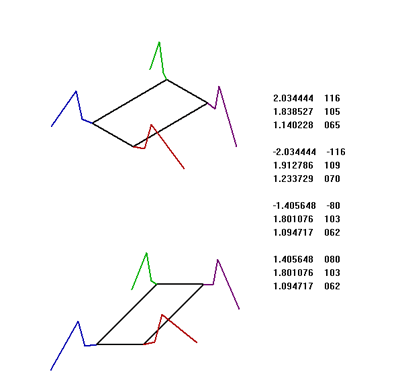
Mathematical diversion
Hera is a mathematical nerdy, therefore minimized
The leg consists of three links, it turns out quadruplet nodal points. To solve the straight-from-the-shoulder problem (we know the angles of cars - we involve to find the coordinates of the fourth point relative to the first) in the worldwide eccentric, a three-fold replacing of the XYZ basis from point to guide is required, and this is a multiplication of 3x3 matrices whose elements are cos and hell. This is a direct project. And information technology is necessary to work out the REVERSE problem (we live the coordinates - but we need to bet the angles). How to solve this problem in the oecumenical case, we still do not know. The only option that we came heavenward with is a multiple solution to the direct problem with fitting angles to given coordinates with a given erroneousness. But. It saved that the problem was solved by decomposing into several flat problems, for which schooling trig is adequate. Only one base change was required (and that is not in 3D, but in 2D). The hale transmitter motion-picture show was divided into triangles, to calculate the angles of which the arccosine, arcsine and arctangent were mandatory. Since these functions are mutually calculated (victimisation T. Pythagoras, i.e., with the calculation of the square take root), we decided to use exclusive the arcsine. Its expansion in the Elizabeth Taylor / Maclaurin series is the simplest of those given in pedivics. Although one could use a simple piecewise linear or piecewise parabolical approximation with the least squares calculation. (Which would ultimately lead to the same formula as the Taylor series.) This method of calculation (specifically this one, without tricky optimizations and the use of hacker algorithms the like Goertzel with FixedPoint pure mathematics) wish not stretch whatever atmega (at first they also wanted to use it), leave get stuck on the first division OR computing of the root or sin, and thither are dozens of them, and on that point are twelve machines, and the bike is 1/50 of a second. If you still use atmega,
We
do non plan to publish sources , Eastern Samoa there will be populate (surgery rather nonhumans) who will accurate the code, improve it and volition sell it as their own. And no response, no greetings. They wish also botch karma out of envy. Already passed, no more want. It is also repulsive that the robot can be used for illegal purposes. Therefore, NO.
Goals, plans The
main end is generally achieved: the golem walks, almost dances. For now, we'll probably take a timeout before the fall, so that the brain rests. There just mini-cameras will come, we will set.
Thoughts on further use (if your hands get through) are: 1) Set up a sonar on it on a servo machine and scan IT around, send data to a computer, it will build a map of the area (as in games) and accordingly direct the golem advance; 2) Because the battery is pocketable - it makes sense to Thatch it to shoot up itself, i.e. attach two contacts to the baseboard, and and so that he himself connects to them. It wish follow found either by sonography or by infrared or 3) You can learn to walk on the White River dividing line drawn on the floor, for which you need to study only one furrow from the frame from the onboard tv camera, looking forward and down; 4) If you bring your feet under you like a cat / dog, you can implement narrower corridors than with outstretched legs. In point of fact, this is another method of displacement, another math. Sign in September.
Right night and good luck ...
DOWNLOAD HERE
GET RC Walking Robot on MG90 / Sudo Null IT News FREE
Posted by: phillipsolkill.blogspot.com
0 Response to "GET RC Walking Robot on MG90 / Sudo Null IT News FREE"
Post a Comment